|
PROYECTO STARGATE: SERVIDOR SERVOS8
|
Introducción
Servidor de control
de servos para posicionar hasta 8 servos (tipo Futaba
3003 o compatibles) desde el PC. Muy útil para probar
prototipos de robots. Por ejemplo, el robot Cube
Revolutions utiliza este servidor para que un programa del PC
envíe las secuencias de movimiento.
Este servidor
implementa los servicios
básicos
y además dos específicos:
Características
El funcionamiento del
servidor es el siguiente:
Implementación
de los servicios POS y ENA
Implementación
de los servicios
básicos
: PING, ID.
Si
recibe un byte que no reconoce, lo ignora
Inicialmente los
servos están deshabilitados
Servicios especificos
Servicio POS
Este
servicio es sólo de una dirección. El cliente envía
la trama POS pero el servidor no devuelve ninguna respuesta.
Se ha hecho así para que sea un servicio más
"dinámico". La trama es de la siguiente manera:

El
byte de identificación de trama se corresponde con la letra
'W'. Los otros datos son:
Posición:
Valor comprendido entre 0 (un extremo) y 232 (el otro extremo). La
precisión que se tiene es de 0.77 grados.
Ejemplo:
Queremos posicionar el servo 1 en la posición central. El
cliente del PC envía los siguientes 3 bytes:
Trama
enviada: 0x57 0x01 0x74
Servicio ENA
Servicio
también unidireccional, del cliente al stargate, pero no hay
respuesta. La trama es:
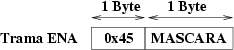
El campo máscara
indica qué servos están activos y cuales no. El bit de
menor peso se corresponde con el servo 1 y el de mayor peso con el
8. Cuando un bit esté a 1 el servo correspondiente estará
activado.
Ejemplo: Queremos habilitar los servos 4 y
7 y que los demás no lo estén. Se envían los
dos bytes siguientes:
Trama
enviada: 0x45 0x48
Implementaciones
|
Microcontrolador
PIC16F876 a 4MHZ
|
Download
|
PIC16F876A
y Compatibles (a 4 Mhz)
|
Links
Noticias
3/Abr/2007:
Publicada implementación
sg-servos8-pic16f876-skypic-1: Para tarjeta Skypic a 20Mhz
26/Dic/2003:
Publicada implementación sg-servos8-pic16f876-xx-0
16/Oct/2003:
Publicado servidor sg-servos8-6811e2-ct-0
[Proyecto
Stargate]
IEA
ROBOTICS
Juan
González



