|
STAR-SERVOS8:
CONTROL DE SERVOS DESDE EL PC
|
|

|
- Nombre:
star-servos8
-
Servicio:
Cliente para el Stargate
servos8
-
Lenguaje:
C
-
Plataforma:
Linux
-
Tipo:
Convencional
-
Descripción:
Control de servos del tipo Futaba 3003 o compatibles desde el PC.
Movimiento mediante barras deslizantes y Canvas. Generación,
grabación y reproducción de secuencias
-
Aplicaciones:
Prototipado rápido de sistemas articulados. Por ejemplo
robots.
|
Introducción
Cuando
se están desarrollando prototipos de robots articulados,
como PuchoBot,
Cube
Revolutions o Sheila,
resulta muy útil poder controlar los servos desde el PC,
utilizando una interfaz gráfica. De esta forma se pueden
definir secuencias sencillas de movimiento sin tener que programar
ningún microcontrolador y así poder validar la
estructura mecánica o el diseño del robot.
El
programa star-servos8 permite manejar hasta 8 servos
del tipo Futaba 3003 o compatibles. El posicionamiento se puede
hacer mediante barras de desplazamiento o usando un canvas. De una
manera muy sencilla se pueden grabar las posiciones de los servos
para generar secuencias de movimiento, que se pueden grabar en un
fichero para recuperarlas posteriormente.
Esta
aplicación forma parte del proyecto
Stargate, y es un cliente para el servidor servos8.
Características
Autores
Licencia
Este
programa se distribuye bajo licencia
GPL
Conexión de los servos
Los
servos se conectan a una placa con un microcontrolador (Stargate),
y se graba el servidor servos8.
Los microcontroladores soportados actualmente son: PIC16F87X,
68HC11 y 68HC08. El usuario puede fabricarse su propia
placa o bien utilizar alguna de las siguientes, en las que se ha
probado su funcionamiento:
Tarjeta
Skypic. La conexión de los servos es inmediata, ya que
dispone de conectores específicos. Se trata de hardware
libre y por tanto todos lo esquemas están disponibles.
Tarjeta
CT6811. Para conectar los servos hay que utilizar una plaquita
que tenga conectores de servos por un lado y conector para cable
plano de bus por otro. También es hardware libre.
Tarjeta
GPBOT. Hay que construirse también una plaquita de
adaptación. Esta placa NO es hardware libre.
El
Stargate se conecta al PC a través
de un cable serie.
Pantallazos
-
|
|
|
|
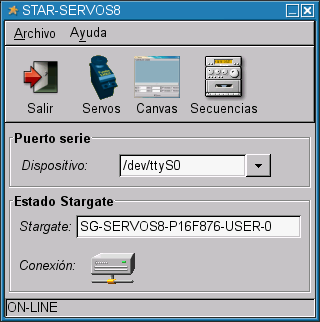
Ventana
inicial, que da acceso al resto de ventanas de control.
Permite configurar el dispositivo serie en el que está
conectado el stargate. Muestra en todo comento el identificador
del stargate y el estado de la conexión.
|
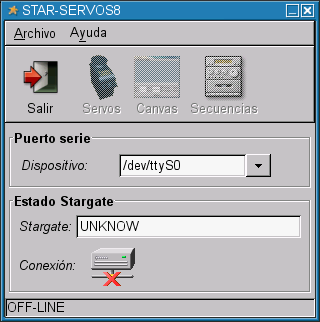
En
todo momento se está comprobando la conexión con
el stargate. Si se desconecta se indica.
|
-
|

|
|
Ventana
principal para el posicionamiento de servos. Movimiento con
el raton cada una de las barras deslizante, se actúa
sobre cada uno de los servos. Se pueden habilitar/deshabilitar
los servos marcando las casillas de la izquierda. El botón
de Reset lleva a todos los servos a la posición inicial.
|
-
|
|
|
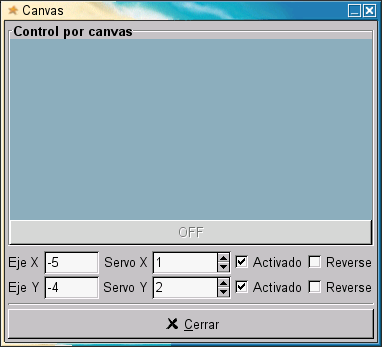
Ventana
de control por canvas. Moviendo el ratón por la
zona azul se actúa sobre los dos servos asociados. En
este ejemplo, el servo 1 se controla con el eje X y el servo
2 con el Y. Se pueden habrir tantas ventanas de control por
canvas como se quiera. Este tipo de control resulta
especialmente últil cuando se está moviendo
una cámara con dos grados de libertad.
|
-
|
|
|
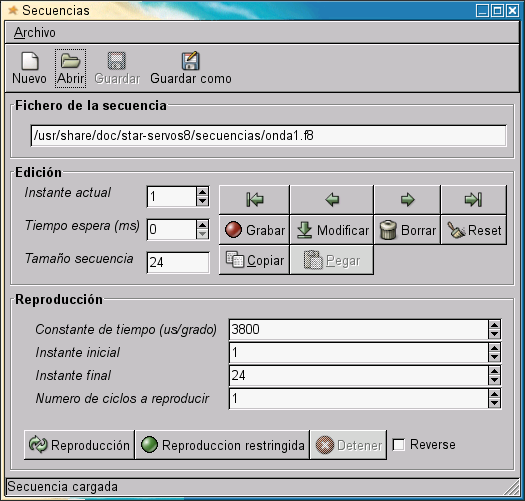
Ventana de grabación
de secuencias. En cada instante se puede grabar una
posición de los servos (similar a los “fotogramas”
en el mundo de la animación). Mediante los botones de
edición podemos recorrer todos los instantes. Pulsando
el botón de reproducción ejecutamos la
secuencia de movimiento grabada. Estas secuencias se pueden
grabar en ficheros para luego leerlos posteriormente.
|
Aquí se puede ver un
pantallazo final el
programa star-servos8 funcioando en un escritorio Gnome, en un
portátil con Debian/Sarge.
Download
Instalación
Debian/Sarge
Instalar
primero la librería libstargate
1.0.1. Para ello descargar el paquete
para Debian/Sarge y ejecutar:
- # dpkg -i
libstargate-1.0.1-1_i386.deb
Descargar
el paquete
del star-servos8 para Debian/Sarge y teclear:
- # dpkg -i
star-servos8-1.0-1_i386.deb
Teclar
star-servos8 para ejecutarlo
Otras
distribuciones
No
hay paquetes creados para otras distribuciones. Hay que compilar el
paquete fuente:
Compilar
e instalar la
libstargate
1.0.1
Bajar
y descomprimir el paquete star-servos8-1.0.tar.gz
$
tar vzxf star-servos8-1.0.tar.gz
Entrar
en el directorio
$
cd star-servos8-1.0
Ejecutar:
./configure
Si
todo ha ido bien, compilar: make
Instalar
con : make install
Links
Noticias
[Proyecto
Stargate]
IEA
ROBOTICS
Juan
González
{kind=link}