| TARJETA Sky293 |
| [Introducción] | [caracteristicas] | [Autores] | [Licencia] | [Puertos] |
| [Alimentación] | [Download] | [Links] | [Noticias] | [Agradecimientos] |
La tarjeta Sky293 proporciona la posibilidad de
controlar motores, leer sensores y activar/desactivar un relé. Está
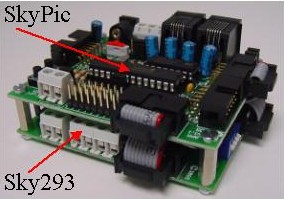
diseñada para adaptarse perfectamente a la
tarjeta SkyPic,
aunque se puede usar con cualquier
otro microcontrolador. La versión actual es la v1.0
En el Robot Skybot es la tarjeta que se encarga de mover los motores y de
polarizar los sensores de entrada.
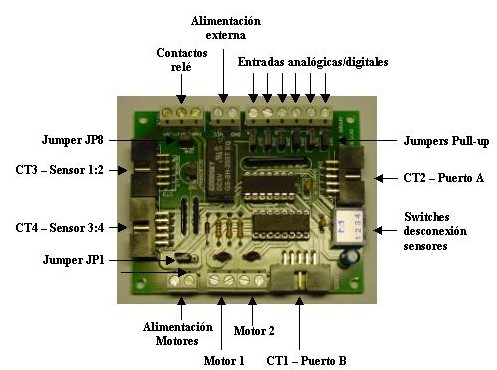
La tarjeta Sky293 tiene dos puertos, denominados A y B, puesto que se pueden conectar directamente a los puertos A y B de la tarjeta SkyPic.
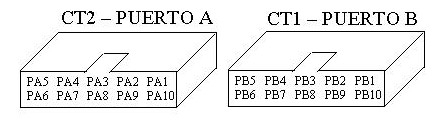
| PA1: Entrada analógica/digital 1 | PB1: Sentido de giro Motor 1 |
| PA2: Entrada analógica/digital 3 | PB2: Sentido de giro Motor 2 |
| PA3: Entrada analógica/digital 4 ó Relé | PB3: Estado sensor 2 |
| PA4: NC | PB4: Estado sensor 4 |
| PA5: Vcc | PB5: Vcc |
| PA6: GND | PB6: GND |
| PA7: NC | PB7: Estado sensor 3 |
| PA8: Input/Output ó TOCK | PB8: Motor 2, ON/OFF |
| PA9: Entrada analógica/digital 2 | PB9: Motor 1, ON/OFF |
| PA10: Entrada analógica/digital 0 | PB10: Estado sensor 1 |
La tarjeta Sky293 tiene dos puertos, denominados Sensor 1:2 y Sensor 3:4, donde se conectarán los sensores CNY70.
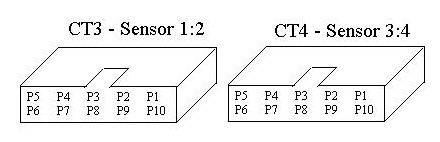
| P1: Pin E (Sensor 1) | P1: Pin E (Sensor 3) |
| P2: Vcc - Pin C,A (Sensor 1) | P2: Vcc - Pin C,A (Sensor 3) |
| P3: Pin K (Sensor 1) | P3: Pin K (Sensor 3) |
| P4: Pin E (Sensor 2) | P4: Pin E (Sensor 4) |
| P5: Vcc - Pin C,A (Sensor 2) | P5: Vcc - Pin C,A (Sensor 2) |
| P6: Pin K (Sensor 2) | P6: Pin K (Sensor 4) |
| P7: Vcc - Pin C,A (Sensor 2) | P7: Vcc - Pin C,A (Sensor 4) |
| P8: Pin E (Sensor 2) | P8: Pin E (Sensor 4) |
| P9: Pin K (Sensor 1) | P9: Pin K (Sensor 3) |
| P10: Vcc - Pin C,A (Sensor 1) | P10: Vcc - Pin C,A (Sensor 3) |
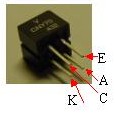
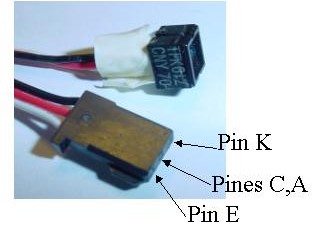
La conexión de los sensores de infrarrojos de tipo CNY70 se realiza de cualquiera de las dos formas siguientes:
a) Usando un conector de 3 vias:



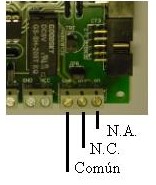
El relé funciona como un conmutador de dos posiciones, tiene tres patillas denotadas por N.C.(Normalmente cerrada), N.A.(Normalmente abierta) y la patilla común. El funcinamiento es el siguiente, cuando el relé está en reposo está cerrado el cicuito formado por las patillas común y N.C., cuando excitamos el relé se abre el circuito anterior y se cierra el formado por las patillas común y N.A.
La Sky293 se alimenta con 5v, a través de los puertos de expansión (puerto A o Puerto B) o mediante la clema. La alimentación de los motores se puede hacer de forma independiente a través de una clema. En ese caso hay que poner el jumper JP1 en la posición 1-2.
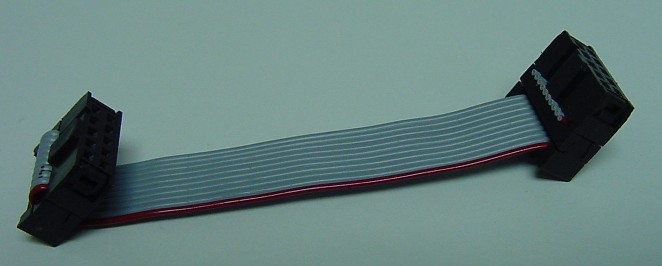
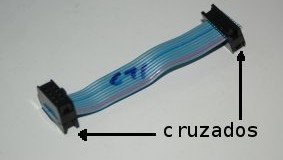
Los cables de bus que usaremos para conectar la Sky293 con la tarjeta SkyPic serán rectos.
| Planos TARJETA SKY293 v1.0 |
| sky293.sch.pdf | Esquemático en pdf |
| sky293.sch | Esquemático, en Eagle |
| sky293.brd | PCB, en Eagle |
| sky293.abajo.pdf | PCB. Cara de soldadura (cara de abajo) |
| sky293.arriba.pdf | PCB. Cara de los componentes (cara de arriba) |
| sky293.seri.pdf | PCB. Serigrafía |
| sky293.gerber.zip | Ficheros GERBER para el fabricante |
| sky293.drill.zip | Ficheros con información de taladros |
| sky293.bom | Listado componentes |
| Programas en C para probar la SKY293 usando una SKYPIC |
| bumper2.c | bumper2.hex | bumper2 | Prueba de la entrada digital AN1 mediante el LED de la SKYPIC. |
| rele.c | rele.hex | rele | Prueba del rele mediante Terminal Serie a 9600,8N1 |
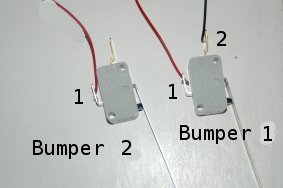
| contacto.c | contacto.hex | contacto | Mueve el robot SKYBOT en la dirección del bumper que pulsemos |
| conversor.c | conversor.hex | conversor | Prueba del conversor analógico digital interno |
| cny70.c | cny70.hex | cny70 | Prueba de los sensores CNY70 mediante Hyperterminal a 9600,8N1. |
| motor.c | motor.hex | motor | Prueba de los motores mediante Hyperterminal a 9600,8N1 |
| bumper.c | bumper.hex | bumper | Prueba de las entradas digitales mediante Hyperterminal a 9600,8N1 |

|
La empresa Array Electronica Profesional, S.A. está comercializando los siguientes productos relacionados con la SKY293:
|
|
|
Array Electronica Profesional Juan de Austria 20, 28010 Madrid arrayep@teleline.es |
||