|
|
|
"Granja de Micro-Robots”. EbroParty. Miranda de Ebro. Abril 2007 |
|
|
Título: “Granja de Micro-Robots”
Duración: 50 minutos de conferencia-show + 1h de demostraciones, donde la gente viene y ve los robots de cerca
Evento: Ebroparty.
Organización: Asociación Mirandesa de Informática
Organización de la conferencia-show: Esta charla es parte de las actividades organizadas por Quark Robotics
Lugar: Pabellón Multifuncional de Bayas. Miranda de Ebro (Burgos).
Fecha: 28 de Abril de 2007
Ponentes:
Robots enseñados: Skybot, Clónico, Melanie III, Configuraciones mínimas, Hypercube, Sam, “Varita mágica”.
El objetivo de esta charla-show es despertar el interés por la robótica entre los asistentes y hacerles ver que es un mundo divertido, apasionante y sencillo. Cualquiera puede construir su primer robot. Sólo se necesitan ganas. Para ello se comienza mostrando el robot más sencillo, el “hola mundo” de la robótica. Se llama Skybot y es el que utilizamos en nuestros talleres de iniciación. Es un robot abierto. Toda la información está disponible bajo una licencia libre: planos, electrónica y software. Se continúa con el Clonico, una versión del Skybot con una estructura mecánica mejorada y propulsión por orugas en vez de ruedas.
A continuación nos centramos en los robots articulados, que tienen una mecánica un poco más compleja y en los que aparece el problema de la coordinación. ¿Cómo coordinar las diferentes articulaciones para conseguir que el robot se mueva?. Como ejemplo se muestra a Melanie III, un robot hexápodo de tres grados de libertado por pata y más de 30 sensores. La coordinación de las articulaciones se resuelve mediante programación gestual o generación de trayectorias a partir de ondas.
En la siguiente parte se habla sobre una nueva tendencia surgida en 1994: La robótica modular. Son robots construidos por la unión de módulos. Se muestran los módulos Y1 y cómo con ellos se han realizado diferentes robots modulares de tipo “gusano”. El primero es el gusano “hola mundo”, el más sencillo que se puede construir, constituido sólo por la unión de dos módulos, y que sólo se puede desplazar hacia adelante y hacia atrás. Añadiendo un módulo más, pero que rote paralelamente al suelo, se logra tener un gusano capaz de moverse en dos dimensiones. El último gusano presentado es Hypercube, formado por 8 módulos, 4 rotan horizontalmente y 4 verticalmente. Se mueve como una serpiente.
Otro tipo de robots son los “robots de protocolo”. Se muestra como ejemplo a Sam, un proyecto en desarrollo, que de momento sólo tiene el busto (cabeza y pecho). Cuenta con dos cámaras en los ojos, que realizan tratamiento de visión artificial, así como transmisión de imágenes por radiofrecuencia. Su boca permite expresar estados de alegría, enfado, sorpresa e indiferencia. Además el robot puede hablar mediante síntesis de voz, a la vez que realiza un efecto de movimiento de labios. Su cabeza puede moverse en vertical y horizontal, gracias a los mecanismos de su cuello.Una pantalla interactiva permite mostrar imágenes, videos y menús en pantalla para que los presentes puedan seleccionar, mediante los botones de los lados de la pantalla, diferentes opciones
Finalmente se hace una friki-demo de cómo controlar servos utilizando el mando de la wii, lo que tiene muchas posibilidades en robótica
|
|
|
Transparencias de la presentación |
|
Presentación en PDF |
|
|
Presentación para OpenOffice 2.0 |
Robot “hola mundo” Skybot
Robot Hexápodo Melanie III
Información sobre los módulos Y1
Robot ápodo Cube Revolutions
Robot de Protocolo Sam
Control de servos con el mando de la wii: La varita mágica.
El sábado 28 de abril, a las 11 de la mañana nos fuimos Alejandro, Ricardo y yo de camino hacia Miranda de Ebro. La charla la teníamos a las 18h, pero preferimos ir con tiempo para ver el ambiente de la party y sobre todo para estar con Jose Luis Martínez Fraile y su espectacular robot Seguritrón.
Llegamos a la hora de comer. En la foto de la izquierda se puede ver la entrada principal de la party y en la derecha está Seguritrón en acción.
|
|
|
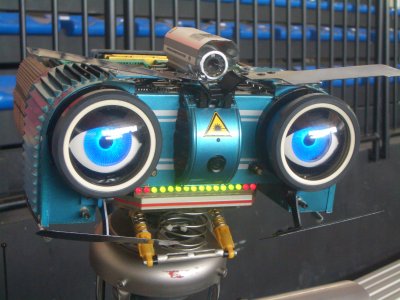
A Jose Luís y Seguritrón no los veís desde su participación en Campus Party 2005. En la izquierda estamos posando para tener una foto oficial ;-) En la derecha se puede ver en detalle la cara de Seguritrón. ¡Espectacular!
|
|
|
La EbroParty se organizó en el pabellón multifuncional de Bayas. En la foto de la izquierda se puede ver un ala del pabellón. Era una party pequeña, de unos 100 asistentes aproximadamente. En la derecha podemos ver a Jose Luis y Ricardo atendiendo las explicaciones de Alejandro. Está diseñando el cuerpo de Sam y quería la consultar la opinión de un experto como Jose Luis.
|
|
|
Sobre las 17 empezamos a montar el despliegue de robots en el escenario. En la izquierda Jose Luis, Alejandro y Ricardo están conversando. En el escenario se puede ver el robot clónico, el Skybot, las dos configuraciones mínimas e hypercube. En la derecha estamos Alejandro y yo con robots listos para comenzar la demostración.
|
|
|
En la izquierda se puede ver a Hypercube cómo repta por el suelo del escenario y en la derecha está Melanie III.
|
|
|
Uno de los comportamientos que están implementados en Sam es el de hacer seguimiento de un objeto azul. En la izquierda Alejandro está haciendo una demostración. En la derecha, uno de los asistentes está moviendo un servo con el mando de la wii. En esta party ha sido la primera en la que hemos mostrado esta aplicación. Realmente la aplicación se “gestó” en la iparty en Castellón, pero aquí fue la primera vez que la mostramos “oficialmente” como parte de una demostración de robótica ;-)
|
|
|