|
Taller de Robótica Básico - Skybot v1.4. - SESION 1 - Trucaje de los servos II |
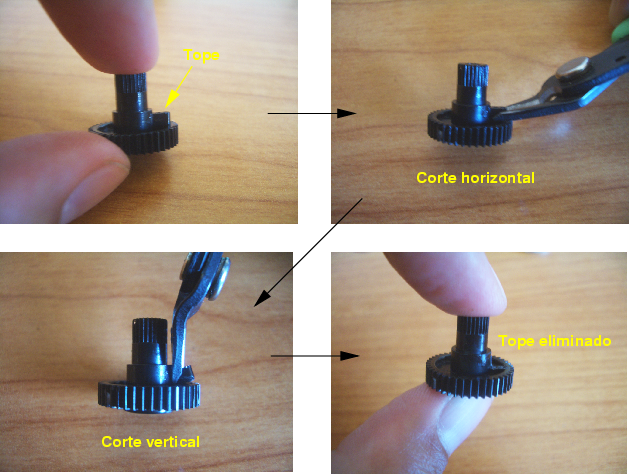
PASO 9. Eliminar el tope mecánico del engranaje E1. ESTA ES LA PARTE MÁS CRÍTICA. Utilizar unos alicates que estén bien afilados y que no sean muy grandes o un cutter. El tope se quita facilmente haciendo un corte horizontal y otro vertical con los alicates o el cutter. Prestar especial atención a no cortar nada más. Sólo el tope.
|
|
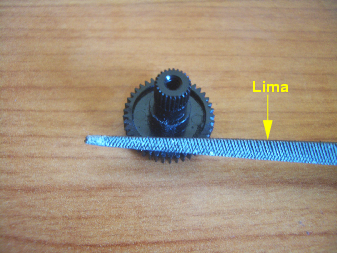
PASO 10. Limar la zona donde estaba el tope para que no queden salientes.
|
|
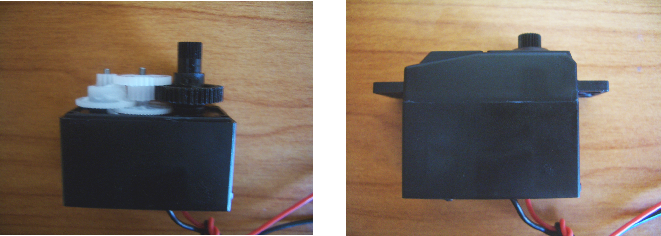
PASO 11. Colocar todos los engranajes y poner la tapa superior. Es muy importante volver a colocar las piezas como estaban al principio. Si nos fijamos en la figura los engranajes blancos giran sobre un pequeño eje metálico. Es necesario que al montar el motor los ejes estén en su sitio. En algunas ocasiones al quitar la tapa dichos ejes quedan en el interior y da la impresión de que los hemos perdido. Por lo tanto revisar siempre la tapa antes de colocarla por si los ejes están todavía en ella.
|
|
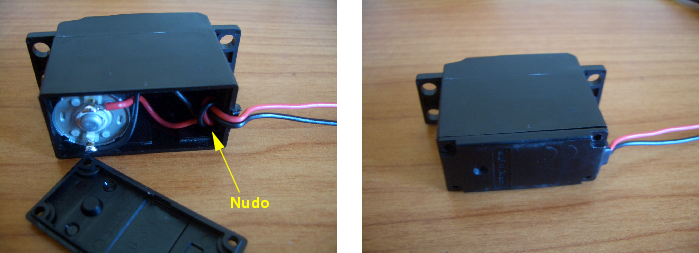
PASO 12. Poner la tapa inferior. Dejar el nudo en el interior y sacar los cables por la ranura de salida
|
|
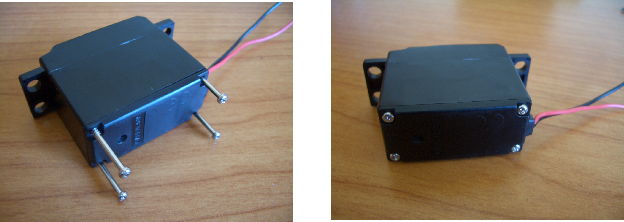
PASO 13. Poner los tornillos inferiores y atornillar la tapa.
|
|
PASO 14. Trenzar los cables para que sea más fácil luego el cableado del robot.
|
|
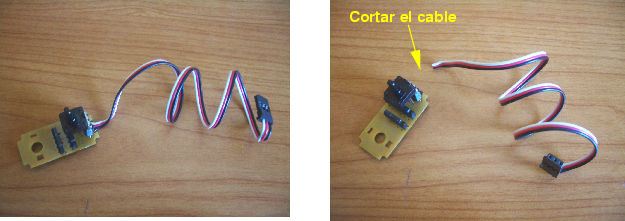
PASO 15. Obtener el cable original del servo. Cortarlo de la electrónica a la que está soldado. Este cable lo utilizaremos para el montaje de los sensores.
|
|
Ya tenemos nuestro servo listo!! Ahora el eje puede girar libremente.
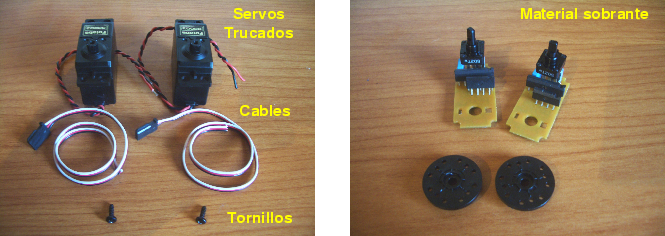
Después de haber trucado los dos servos, lo que tendremos es lo que se muestra en la figura de la izquierda: los dos servos, dos cables y los dos tornillos que van en los ejes de los servos. En la figura de la derecha está el material sobrante, que no utilizaremos para la construcción del robot: la electrónica de los servos y las coronas que iban atornilladas a los ejes.
|
|
Página 2 de 2
|
|