|
Paper 15: ”A Novel Modular Climbing Caterpillar Using Low-frequency Vibrating Passive Suckers” |
|
|
H.
X. Zhang, J.
Gonzalez-Gomez, S.Y. Chen, W. Wang, R. Lin, D. Li,
J.W. Zhang. A Novel Modular Climbing Caterpillar Using
Low-Frequency Vibrating Passive Suckers. IEEE/ASME International
Conference on Advanced Intelligent Mechatronics. AIM2007.
ETH Zurich, September 4-7, 2007, Switzerland
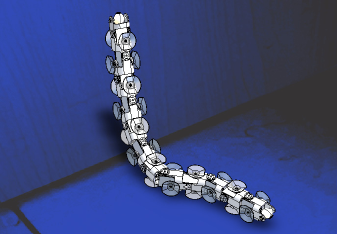
This
paper presents a novel modular climbing caterpillar named ZC-I.
After a related survey on the topic, a systematical summarizing on
the basic functions provided by this system is given. ZC-I features
fast-building mechanical structure and low-frequency vibrating
passive attachment principle. Active joints actuated by RC servos
endow the connecting modules with the ability of changing shapes in
two dimensions. After that the discussion focuses on the various
locomotion capabilities. Linear movement, turning movement, lateral
movement, rotating and rolling movement are achived based on an
inspired control model to produce rhythmic motion. In the end a
conclusion and future work are given.
|
|
This paper was finalist for the AIM 2007 Best Paper Award [Image] |
|
Files for downloading |
|
AIM07.pdf (1.3MB) |
Paper in PDF format |
|
Finalist AIM2007.jpeg (1.8MB) |
Best Paper Finalist Certificate, in JPG format. |
{kind=link}