 La información NO ESTÁ COMPLETA. Se está realizando la migración al wiki desde esta página. La información NO ESTÁ COMPLETA. Se está realizando la migración al wiki desde esta página.
|

Descripción

Piezas necesarias: Los servos + cable rojo y negro
Los servos Futaba 3003 o compatibles son un tipo especial de motores que se usan para construir articulaciones. Tienen un rango de giro limitado a 180 grados (comprobarlo girando el eje con las manos hasta llegar a los dos extremos). En este capítulo trucaremos los servos para convertirlos en motores de corriente continua normales, capaces de girar sin ninguna limitación. Los elementos que emplearemos son los dos servos y 25 cm de cable negro y rojo
Material adicional necesario

Material necesario para el trucaje de los servos
|
1. Destornillador pequeño de cabeza plana
2. Destornillador pequeño de cabeza en estrella
3. Lima
4. Rollo de estaño de 1mm
5. Soldador de punta fina
6. Alicates para cortar
7. Pelacables (opcional)
8. Soporte para soldador (Opcional)
|
| Tened cuidado al emplear el soldador. Conviene que esté siempre situado sobre un soporte cuando no se está utilizando. No dejarlo nunca encendido encima de la mesa. Otra persona se podría quemar sin querer, o el soldador podría entrar en contacto con la propia mesa o algún equipo. Cuando no se vaya a utilizar más, desenchufarlo.
|
Trucando los servos
- Paso 1: Con un destornillador pequeño de estrella quitar la corona del servo, que está atornillada al eje. Guardar el tornillo y la corona.
 Trucade de servos. Paso 1 |
- Paso 2: Con el mismo destornillador, quitar los 4 tornillos de la parte inferior y sacar la tapa. La circuitería del servo quedará al descubierto.
 Trucade de servos. Paso 2 |
- Paso 3: Retirar la tapa superior. Se verán todos los engranajes. Quitar los engranajes E1 y E2, que se muestran en la figura. En algunas ocasiones al quitar la tapa algunos de los engranajes se quedan dentro de ella, no pasa nada, tan solo teneis que tener en cuenta que están ahí a la hora de volver a montar el servo. Sobretodo tened cuidado de no perder los dos ejes metálicos sobre los que giran los engranajes blancos. Recordad que hay veces que se quedan en la tapa del servo.
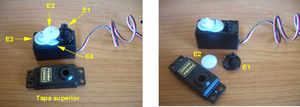 Trucade de servos. Paso 3 |
- Paso 4: Quitar la circuitería. Para ello apretar con el dedo en el saliente negro donde estaba situado el engranaje E1. Utilizando un destornillador finito, introducirlo por una de las esquinas de la parte inferior y hacer palanca. La circuitería sale tirando y no hay que hacer mucha fuerza.
 Trucade de servos. Paso 4 |
- Paso 5: La electrónica lleva soldado un pequeño motor de corriente contínua que tendremos que extraer, quitando el estaño con el soldador. Si se realiza entre dos personas resulta más sencillo. Uno coloca el soldador en los puntos de soldadura del motor y el otro tira del motor, con los dedos, sin aplicar mucha fuerza. Intentad que el soldador este poco tiempo en contacto con la pata del motor. Un soldador de 14W JBC con 2 segundos tiene suficente para desoldar la pata.
 Trucade de servos. Paso 5 |
- Paso 6: Soldar los cables. Tomar un cable rojo y negro de unos 25cm de longitud cada uno y soldarlos a los pines del motor. Primero pelar unos 2mm los cables y estañearlos (significa poner un poco de estaño en la zona pelada calentándolo con el soldador). Después soldarlos en dirección horizontal a los pines. Soldar el cable rojo al pine que tiene un punto rojo y el negro al otro. Recordad lo mismo de antes, el tiempo de soldadura tiene que ser el más pequeño posible para evitar daños en el motor.
 Trucade de servos. Paso 6 |
- Paso 7: Introducir el motor en la caja del servo.
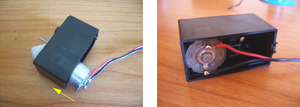 Trucade de servos. Paso 7 |
- Paso 8: Hacer un nudo en los cables. Quedará en el interior del servo e impedirá que las soldaduras de los cables se suelten si hay un tirón.
 Trucade de servos. Paso 8 |
- Paso 9: Eliminar el tope mecánico del engranaje E1. ESTA ES LA PARTE MÁS CRÍTICA. Utilizar unos alicates que estén bien afilados y que no sean muy grandes o un cutter. El tope se quita facilmente haciendo un corte horizontal y otro vertical con los alicates o el cutter. Prestar especial atención a no cortar nada más. Sólo el tope.
 Trucade de servos. Paso 9 |
- Paso 10: Limar la zona donde estaba el tope para que no queden salientes.
| [[ |thumb|500px| Trucade de servos. Paso 10]]
|
- Paso 11: Colocar todos los engranajes y poner la tapa superior. Es muy importante volver a colocar las piezas como estaban al principio. Si nos fijamos en la figura los engranajes blancos giran sobre un pequeño eje metálico. Es necesario que al montar el motor los ejes estén en su sitio. En algunas ocasiones al quitar la tapa dichos ejes quedan en el interior y da la impresión de que los hemos perdido. Por lo tanto revisar siempre la tapa antes de colocarla por si los ejes están todavía en ella.
| [[ |thumb|500px| Trucade de servos. Paso 11]]
|
- Paso 12: Poner la tapa inferior. Dejar el nudo en el interior y sacar los cables por la ranura de salida
| [[ |thumb|500px| Trucade de servos. Paso 12]]
|
- Paso 13: Poner los tornillos inferiores y atornillar la tapa.
| [[ |thumb|500px| Trucade de servos. Paso 13]]
|
- Paso 14: Trenzar los cables para que sea más fácil luego el cableado del robot.
| [[ |thumb|500px| Trucade de servos. Paso 14]]
|
- Paso 15: Obtener el cable original del servo. Cortarlo de la electrónica a la que está soldado. Este cable lo utilizaremos para el montaje de los sensores.
| [[ |thumb|500px| Trucade de servos. Paso 15]]
|
Resultado final
Enlaces
Noticias











