|
Taller de Robótica UCA 2005. SESION 2. Colocando la tarjeta Skypic |
|
|
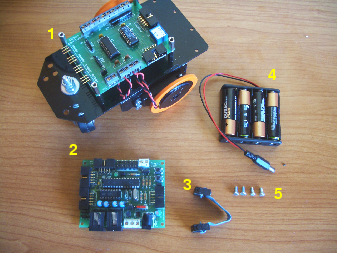
Montaremos el “cerebro” del robot, la tarjeta Skypic y el robot quedará listo para hacer pruebas.
|
|
1) Robot después de montar la etapa de potencia 2) Tarjeta Skypic, “el cerebro” 3) Cable de cinta plana con sus conectores 4) Portapilas 5) Cuatro tornillos para los separadores, de 8mm de largo y 2mm de diámetro |
|
|
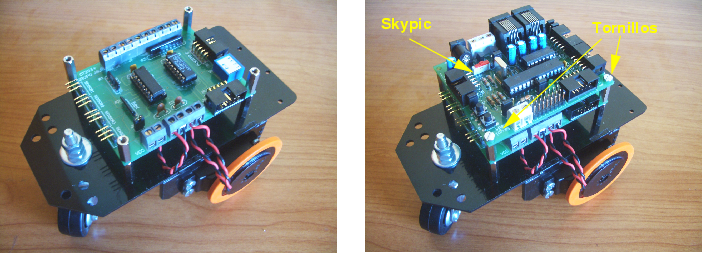
Paso 1. Colocar la Skypic sobre la SKY293 en la misma posición que se indica en la foto de la derecha. Colocar dos tornillos para sujetar la Skypic. Sólo colocaremos 2. Más adelante habrá que quitarla para conectar más cosas a la SKY293.
|
|
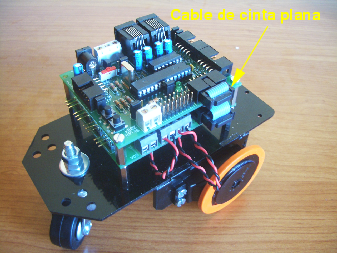
Paso 2. Poner el cable de cinta plana entre el conector CT2 de la Skypic y el puerto A de la SKY293.
|
|
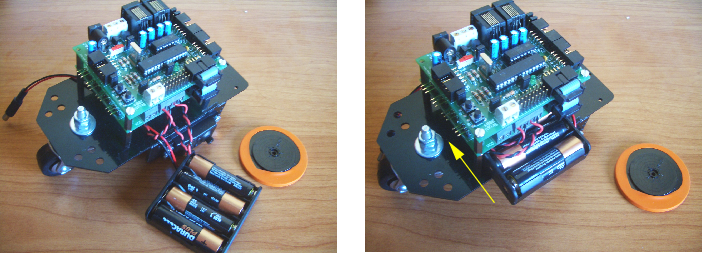
Paso 3. Quitar una de las ruedas para introducir el portapilas en la parte la estructura y la SKY293. Volver a colocar la rueda.
|
|
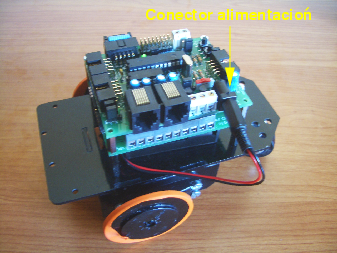
Paso 4.Para alimentar el robot introducir el jack macho del portapilas en el jack hembra de la Skypic.
|
|
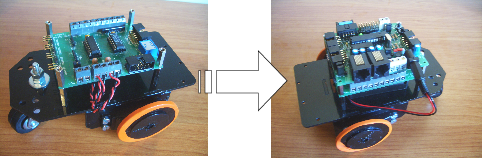
Ya tenemos el robot listo para hacer pruebas de movimiento y de los sensores! El pinguino es opcional y no está incluido :-)
|
|