|
Taller de Robótica Básico - Skybot v1.3. - SESION 2. Preparación de los sensores |
|
|
Soldaremos los sensores a los cables para dejarlos listos para las pruebas.
|
|
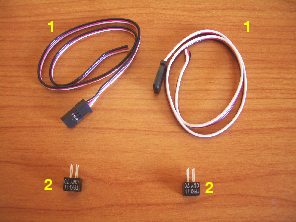
1) Los dos cables obtenido en el proceso de trucaje 2) Dos sensores de infrarrojos, de tipo CNY70 |
|
|
1) Soporte para soldador 2) Soldador 3) Rollo de estaño de 1 mm 4) Pelacables (opcional) |
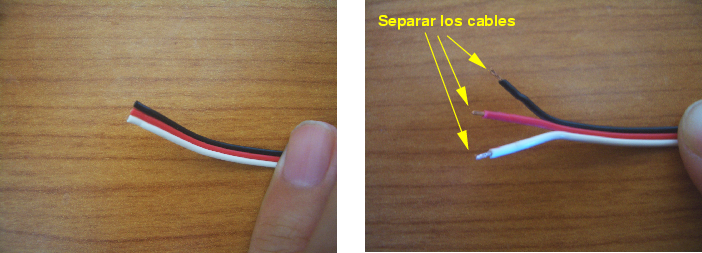
Paso 1. Tomar el extremo del cable que no tiene el conector, separar los cables y pelarlos
|
|
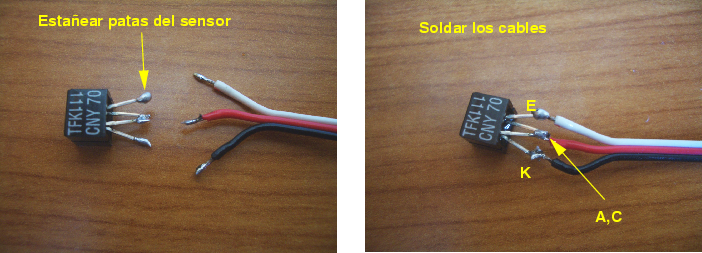
Paso 2. Con el soldador calentar los extremos de los cables y aplicar un poco de estaño (estañear los cables).
|
|
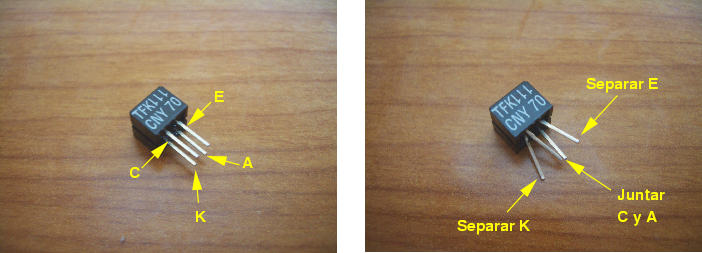
Paso 3. Preparar el sensor para soldar los cables. Tiene 4 patas. Según se mira como en la foto de la izquierda, las dos patas superiores son C y E y las inferiores K y A. Juntar las patas C y A, que irán soldadas juntas. Separar las patas K y E para que se más fácil soldar los cables.
|
|
Paso 4.Estañear las patas del sensor. Las patas C y A juntas. Soldar las patas a sus correspondientes cables. La pata E al Blanco, la K al negro y la A y C al rojo.
|
|
Paso 5. Ya está listo el sensor. Más adelante pondremos cinta aislante para evitar que haya cortocircuitos. Pero antes habrá que probarlos para ver si están bien soldados.
|
|
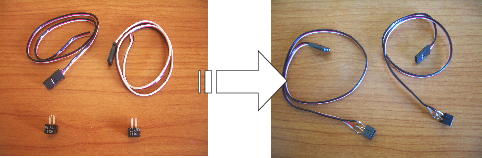
Al final tendremos dos sensores listos para probar:
|
|