|
Taller de Robótica Básico - Skybot v1.3. - SESION 2 - Estructura mecánica II |
|
|
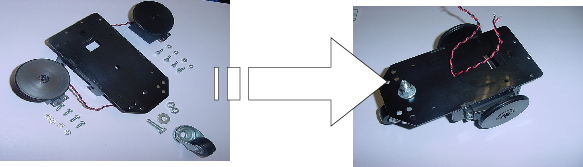
Terminaremos de montar la estructura, acoplando los servos trucados al chásis, colocando la rueda loca y rematando las ruedas.
|
|
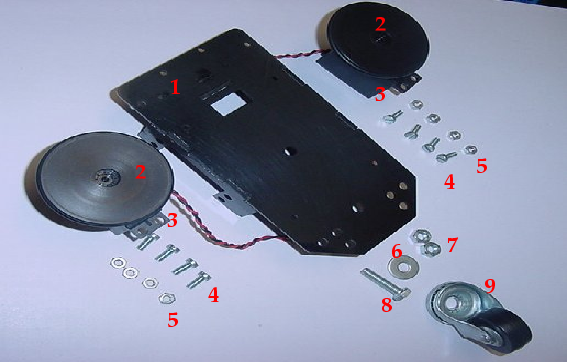
1) Chásis construido en sesión I 2) Ruedas, construidas en la sesión I 3) Servos trucados en la sesión I 4) En total 8 tornillos de 1cm de largo métrica 4mm, pueden ser avellanados o no. 5) 8 tuercas para los tornillos de métrica 4mm 6) Arandela 7) Dos tuercas para tornillo de métrica 6mm 8) Tornillo de 3cm de largo y métrica 6mm 9) Rueda loca |
Para la construcción de la estructura necesitaremos la herramientas mostradas en la figura:
|
|
1) Alicates de cabeza plana 2) Destornillador de cabeza plana 3) Tijeras |
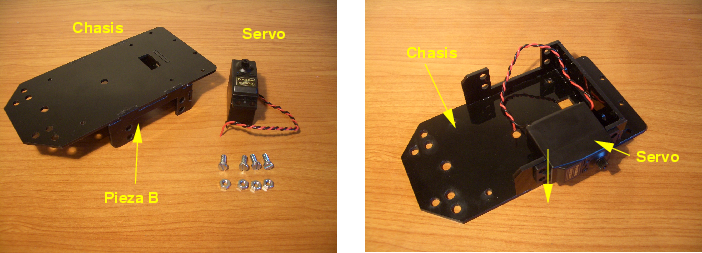
Paso 1. Primero pondremos unos de los motores. Poner el chásis con la superficie en contacto con la mesa. Colocar el servo como se indica en la figura, empujando suavemente por arriba hasta que encaje perfectamente en la pieza B.
|
|
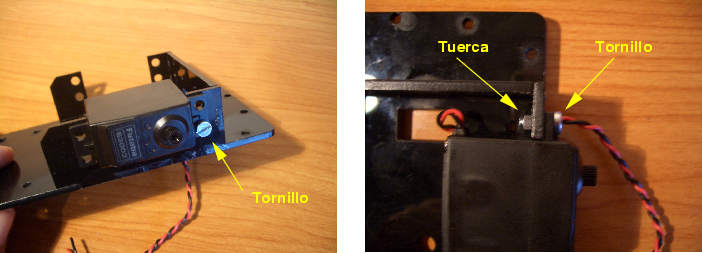
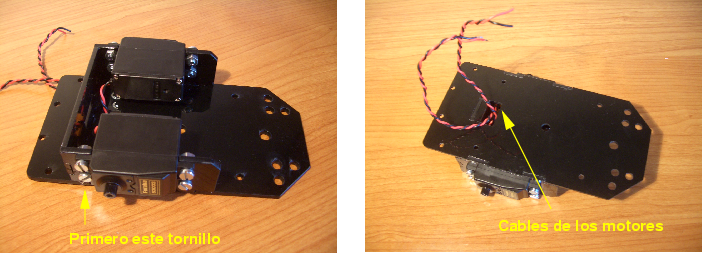
Paso 2. Poner el tornillo que se indica. Es el más complicado porque hay poco espacio para meter los dedos. Por eso recomendamos montarlo alrevés de como se muestra en la foto. Es decir la tuerca por fuera y el tornillo por el interior del chasis. Apretar el tornillo con un destornillador de cabeza plana.
|
|
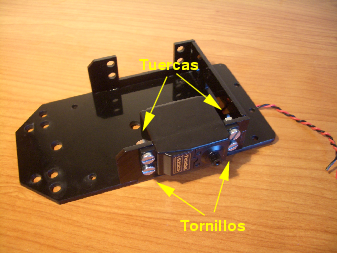
Paso 3. Colocar los tres tornillos restantes, con su correspondientes tuercas en la parte interior
|
|
Paso 4.Colocar el otro servo, de la misma manera que se ha colocado el anterior. Poner primero el tornillo indicado y luego el resto. Sacar los cables de los motores por la ranura superior, como se indica en la figura de la derecha.
|
|
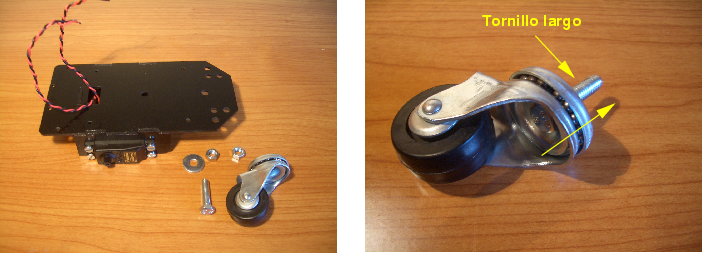
Paso 5. Ahora empezaremos a colocar la rueda loca trasera. En la figura de la izquierda se muestran las piezas necesarias. Tomamos el tornillo largo y lo introducimos a través del hueco de la ruda loca, como se indica en la figura de la derecha.
|
|
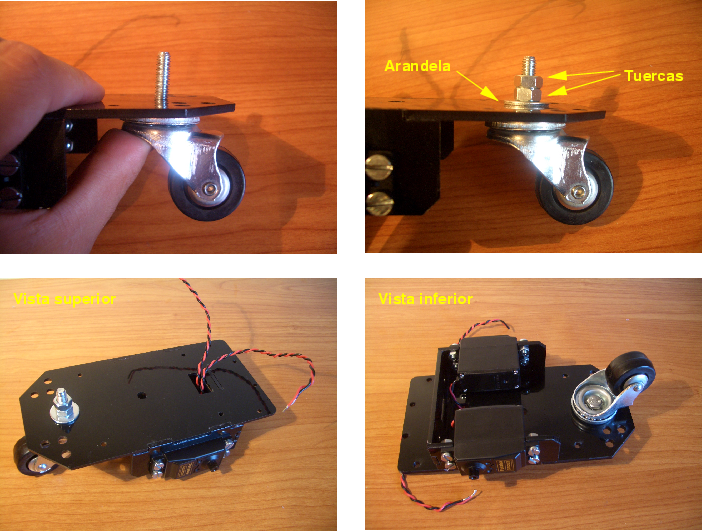
Paso 6. Introducir el tornillo de la rueda loca por el agujero central trasero. Colocar una arandela y dos tuercas. En las foto se puede ver cómo queda montada la rueda.
|
|
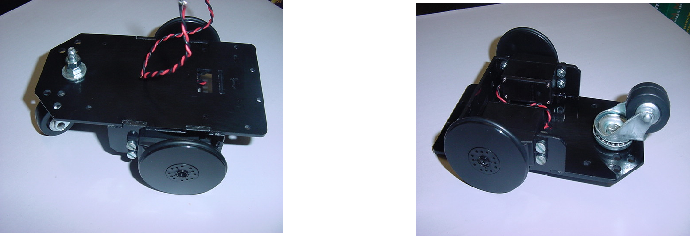
Paso 7. Introducir las ruedas presionando sobre el eje. Si se presiona por el exterior se podrian despegar las piezas D y E.
|
|
Ya tenemos la estructura lista!!!
Este es el aspecto que tiene la estructura, vista desde la parte superior e inferior. Para la gente que sea muy impaciente y que quiera ver el robot en movimiento puede colocar los cables de los motores sobre el conector del portapilas, de forma similar a como se hizo en el capítulo de prueba de los servos.
|
|