|
Taller de Robótica CampusBot 2005. SESION 2. Colocando los sensores |
|
|
Soldaremos los sensores a los cables para dejarlos listos para las pruebas.
|
|
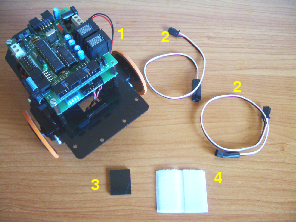
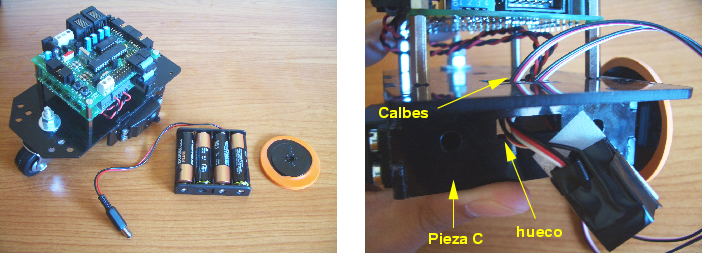
1) Robot, en el estado en el que se dejó en el paso “Conexión de la Skypic” 2) Los sensores, protegidos con cinta aislante 3) Pieza de plástico negra 4) Trozo de velcro |
|
|
1) Rollo de cinta aislante 2) Tijeras |
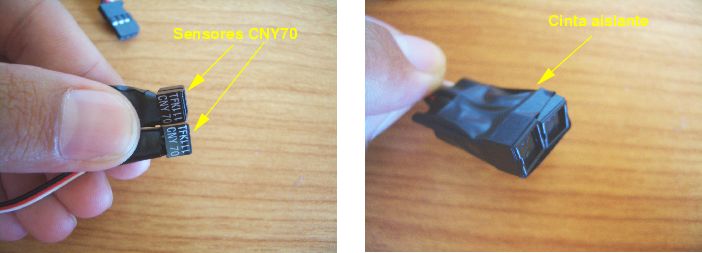
Paso 1. Juntar los dos sensores y envolverlos con cinta aislante, para que queden juntos
|
|
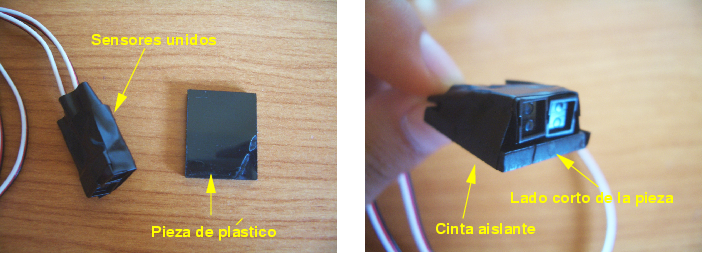
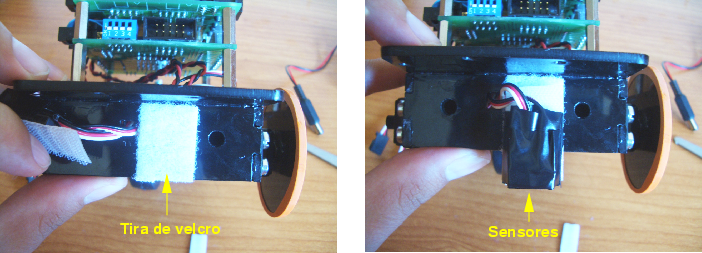
Paso 2. Colocar los sensores unidos sobre la pieza de plástico, de manera que asomen por uno de los lados más cortos. Envolver con cinta aislante para que los sensores se queden sujetos a esta pieza.
|
|
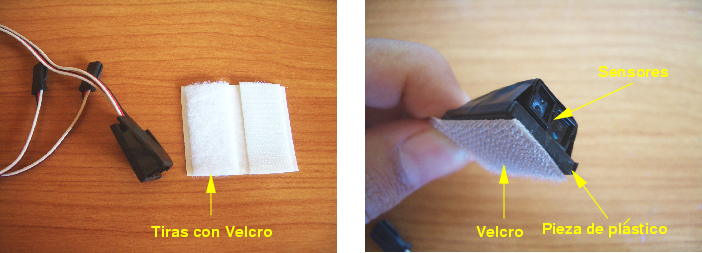
Paso 3. Poner una tira de velcro por debajo de la pieza de plástico. Esto nos servirá para poner los sensores en el robot y regular la altura fácilmente.
|
|
Paso 4. Quitar una rueda y extrar el portapilas. Introducir los cables de los sensores por el hueco rectangular de la pieza C, en la parte frontarl del robot. Sacar los cables hacie el exterior del robot a través del otro hueco rectangular de la pieza A.
|
|
Paso 5. Colocar la otra tira de velcro en la pieza C, lo más centrado que se pueda. Situar los sensores uniendo las dos tiras de velcro.
|
|
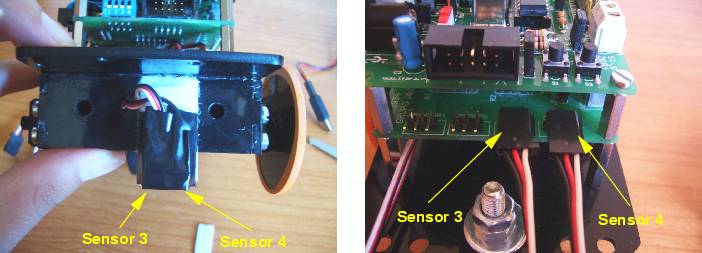
Paso 6. Pasar los cables de los sensores por el hueco entre la CT293 y la superficie de la estructura (el hueco donde va el portapilas), llevarlos a la parte trasera y conetarlos a la tarjeta CT293. Colocarlos como se indica en la figura, para que los programas de prueba funcionen sin tener que cambiar nada.
|
|
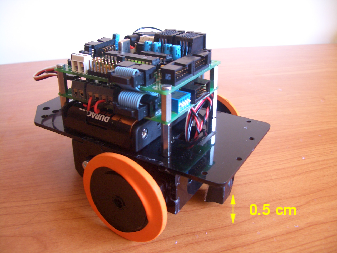
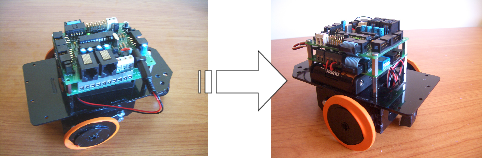
Paso 7. Poner el portapilas, colocar la rueda y ajustar la altura de los sensores para que están a 0.5cm del suelo aproximadamente.
|
|
Ya tenemos el robot con los sensores colocados y listos para seguir una línea negra.
|
|