Introducción
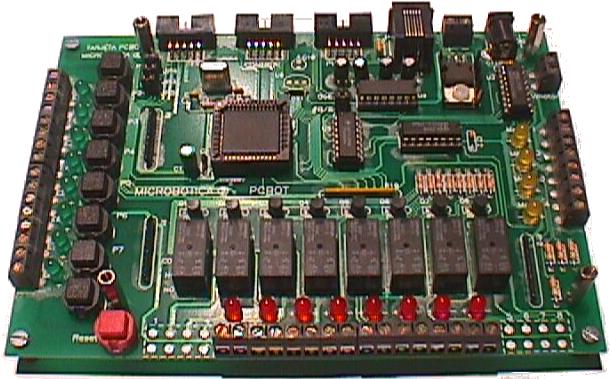
La tarjeta PCBOT permite controlar circuitos externos desde un PC. Dispone de 8 salidas
que permiten abrir/cerrar circuitos externos, 8 entradas para conectar interruptores externos y conexión
para 4 motores. Hay 8 pulsadores que permiten simular entradas externas y leds que indican el estado de
las salidas y los motores, de manera que se pueden depurar aplicaciones sin necesidad de conectar
motores ni circuitos externos.
La programación de PCBOT se puede realizar de varias maneras, según al nivel en que nos queramos
mover (depende de los conocimientos del usuario/programador).
- Programación desde el PC utilizando un intérprete de un lenguaje muy sencillo, pensado para
aquellas personas que tienen conocimientos muy básicos de programación. Mediante este lenguaje
de programación, se tiene pueden activar/desactivar las salidas, los motores, así como tomar
decisiones en función de lo recibido por las entradas.
-
Programación desde el PC, controlando la tarjeta desde nuestras aplicaciones escritas en C. Son necesarios
conocimientos más avanzados de programación. Las herramientas empleadas son las mismas que para
programar la tarjeta CT6811 desde el PC.
-
Construcción de un sistema autónomo, programando aplicaciones directamente para el microcontrolador
68hc11. En este caso la tarjeta PCBOT NO se conecta al PC y se programa con las mismas herramientas
que la tarjeta CT6811
Se trata de una placa MULTIPLATAFORMA, que se puede usar tanto en máquinas Linux como Windows.
Características
- 8 entradas de tipo ON/OFF, para conectar interruptores externos
- 8 salidas de tipo ON/OFF a través de Relé
- Control de 4 motores, de tres estados: parado, adelante, atrás.
- Conexión al PC a través del puerto serie (RS-232)
- 8 pulsadores para simular entradas externas
- 8 leds verdes para indicar el estado de las entradas
- 8 leds rojos para indicar el estado de las salidas
- 4 leds amarillos para indicar el estado de los motores
- Alimentación: Entre 6-12 voltios
- Alimentación externa de los motores
- Clemas para la fácil conexión de los circuitos/motores externos
Autores
Licencia
La tarjeta PCBOT es hardware abierto, por lo que se permite su copia, modificación y distribución, siempre y cuando se mantenga esta nota.
Historia
La Tarjeta PCBOT se diseñó para vendérsela a la empresa
MICROLOG, con los que se mantiene exclusividad en la venta.
La primera tirada se realizó en febrero de 1999.
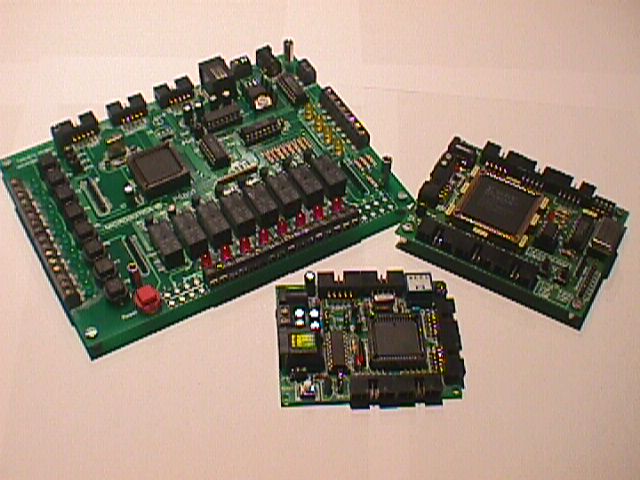
Aquí se muestra una foto de PCBOT junto a la tarjeta
CT6811 y la
JPS
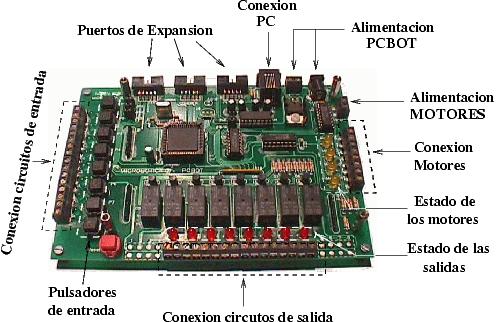
Puertos de expansión
La TARJETA PCBOT incluye tres puertos de expansión por los que se han sacado diferentes pines del 6811.
En la siguiente figura se muestran estos puertos así como los pines del 6811 empleados para cada recurso
de PCBOT.

Alimentación
La tarjeta PCBOT se alimenta bien a través de un conector de tipo Jack o conectando los cables a la clema de alimentación.
La alimentación nominal es de 6-12 voltios.

¡¡¡LA POLARIDAD ES JUSTO LA CONTRARIA QUE LA DE LA TARJETA CT6811!!!
Download
|
SOFTWARE PARA MSDOS/WINDOWS
|
| activa1.bot |
Activar la salida 1 |
| activa8.bot |
Activar la salida 8 durante 3 y luego desconectarla |
| entrada1.bot |
Activar la salida 1 cuando se activa la entrada 1 |
| motor.bot |
Mover el motor 1 en un sentido, pararlo y luego moverlo en otro |
| infinito.bot |
Activar y desactivar la salida 4 en un bucle infinito |
| control.bot |
Manejar el motor 1 con las entradas 1, 2 y 3 |
| parpadeo.bot |
Activar y desactivar 4 veces la salida 6 |
| retardo.bot |
Ejemplo de retardos |
| salidas.bot |
Ejemplo que activa/desactiva todas las salidas, en grupos de 4 |
| tecla.bot |
Activar la salida 5, esperar a que se pulse una tecla y desactivarla |
| test.bot |
Prueba de PCBOT. Activación/desactivación de todas las salidas y movimiento de todos
los motores, en ambos sentidos |
| ejemplos.zip |
Todos los ejemplos anteriores |
Links
Noticias
- 08/Feb/2003: Colocada información sobre tarjeta PCBOT
Agradecimientos
Página creada por: Juan Gonzalez