Next: 3 Rolling gait Up: 5 Locomotion capabilities Previous: 1 1D sinusoidal gait
![]()
![]()
![]()
Next: 3
Rolling gait Up: 5
Locomotion capabilities
Previous: 1
1D sinusoidal gait
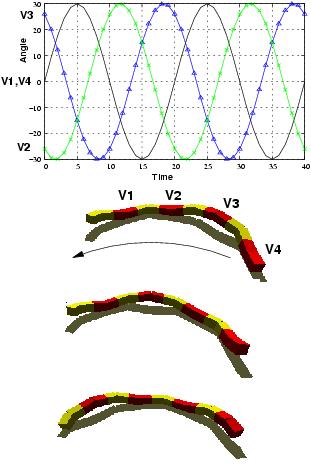
The robot can move along an arc,
turning left or right. The values of the parameters are as same as
that in the 1D sinusoidal gait (Fig.
![]() ),
but now an offset in the horizontal joints is applied (Oh/=0).
Therefore, the horizontal joints are at fixed position all the time.
The robot has the shape of an arc. By changing Oh , the radix of
curvature of the trajectory can be modified.
),
but now an offset in the horizontal joints is applied (Oh/=0).
Therefore, the horizontal joints are at fixed position all the time.
The robot has the shape of an arc. By changing Oh , the radix of
curvature of the trajectory can be modified.
|
|
|
Figure: Turning gait. The same coordination is applied than in the 1D sinusoidal gait. The offset of the horizontal joints determines the arc. |