Next: 7 Conclusion and future Up: Locomotion Capabilities of a Previous: 6 Locomotion areas
![]()
![]()
![]()
Next: 7
Conclusion and future Up:
Locomotion
Capabilities of a Previous:
6
Locomotion areas
All the locomotion capabilities
have been successfully implemented and tested on a real robot. Using
the 1D sinusoidal gait, the robot is capable of going through a
narrow pipe (Fig.
![]() ).
Also, it can traverse a curved tube by means of the turning gait
(Fig.
).
Also, it can traverse a curved tube by means of the turning gait
(Fig.
![]() ).
).
|
Figure: An example of 1D Sinusoidal gait. The robot can go through a tube. |
|
Figure: An example of the turning gait. The robot is going through a curved tube |
The robot can move parallel to its
body axis using the lateral shift gait (Fig.
![]() )
and also can rotate to change its orientation in the plane (Fig.
)
and also can rotate to change its orientation in the plane (Fig.
![]() ).
Both gaits have a little error. When performing lateral shift, the
body of the robot also experiment a small rotation. It is not moving
perfectly parallel to its body axis. Also, when performing rotation,
it has a small displacement. Both effects can be corrected by mixing
these two gaits. If the robot has to move a long distance parallel to
its body axis, after some time, a rotating gait can be perform to
correct the error on the body orientation.
).
Both gaits have a little error. When performing lateral shift, the
body of the robot also experiment a small rotation. It is not moving
perfectly parallel to its body axis. Also, when performing rotation,
it has a small displacement. Both effects can be corrected by mixing
these two gaits. If the robot has to move a long distance parallel to
its body axis, after some time, a rotating gait can be perform to
correct the error on the body orientation.
|
Figure: Experiments on lateral shift gaits. The robot moves parallel to its body axis. |
|
Figure: Rotating gait. The robot can change its body orientation in the plane. |
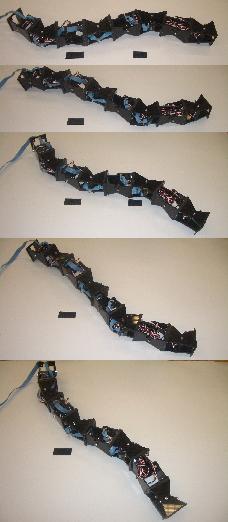
Finally, the experiments on the
rolling gaits are shown in Fig.![]() .
The robot moves very smoothly. If an amplitude of 90 is used (Av=90,
Ah=90 ) the robot has the shape of a square and no global
displacement is achieve. The four sides roll inside or outside the
square at the same time.
.
The robot moves very smoothly. If an amplitude of 90 is used (Av=90,
Ah=90 ) the robot has the shape of a square and no global
displacement is achieve. The four sides roll inside or outside the
square at the same time.
|
Figure: Experiments of the rolling gait |
![]()
![]()
![]()
Next: 7
Conclusion and future Up:
Locomotion
Capabilities of a Previous:
6
Locomotion areas