|
Bitácora: Estancia de tres meses en Hamburgo (II). Feb-Jun 2006 |
Desde el punto de vista de la investigación mi estancia en Hamburgo ha sido muy productiva. Ha nacido el robot Hypercube, contituido por 8 módulos Y1 conectados en desfase: unos se mueven en el plano horizontal y otros en el vertical. La versión previa era Cube Revolutions, que sólo se podía mover en línea recta.
Todo el software está realizado en C# y Mono. Para la generación de las secuencias he probado un nuevo método basado en CPGs (Central Patter Generators). El software permite utilizar CPGs sinusoidales que se aplican a cada módulo, o bien utilizar ondas globales que recorren tanto las articulaciones horizontales como las verticales.
También he estado trabajando en la coordinación de las articulaciones para conseguir diferentes tipos de locomoción: línea recta, giros, desplazamiento lateral y dos tipos de rotaciones.
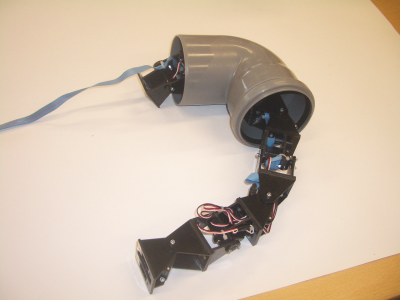
En la foto de la izquierda el robot se está moviendo en línea recta para atravesar un tubo. En la derecha está pasando por un segmento acodado.
|
|
|
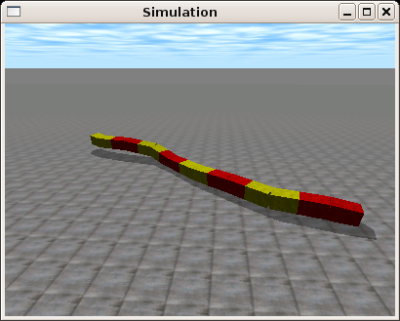
También he finalizado las rutinas necesarias para simular el robot, utilizando el motor físico Open Dynamic Engine (ODE). Los mismos movimientos conseguidos en el robot real funcionan perfectamente en este simulador, por lo que ya está listo para implementar las funciones de evaluación para trabajar con algoritmos genéticos. El simulador se puede ver en la foto de la izquierda.
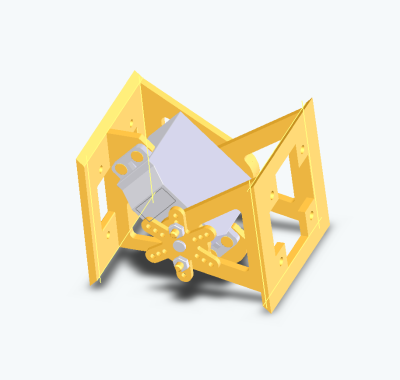
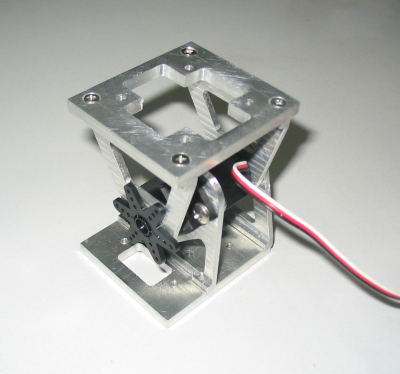
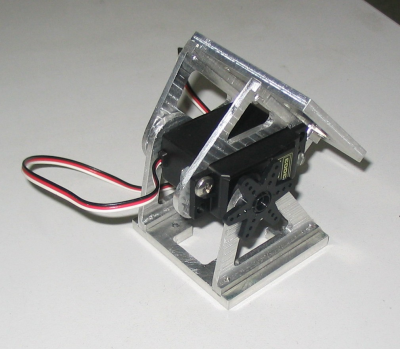
Pero lo más interesante, sin duda, es que hemos trabajado en una nueva versión de los módulos, en colaboración con Houxiang. Él es ingeniero mecánico y ha detectado y corregidos algunos problemas de la versión anterior. El diseño de la nueva versión se puede ver en la foto de la derecha. Están diseñados para ser exremadamente fáciles de montar, utilizando tornillos. Además son de aluminio, lo que los hace más robustos y ligeros.
|
|
|
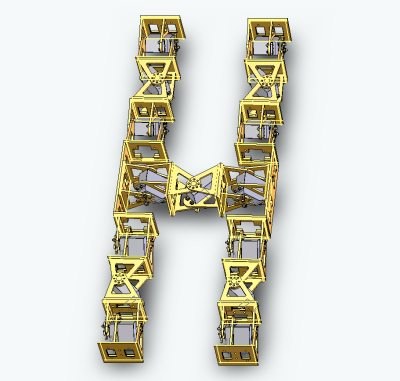
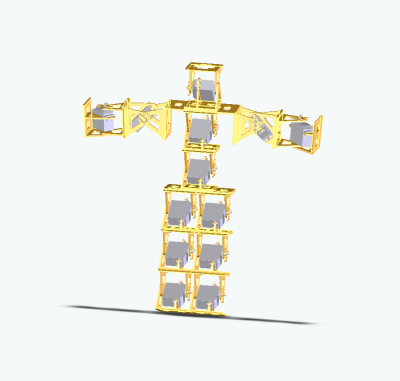
Con esta nueva versión es más sencillo construir otros robots modulares, como el cuadrúpedo de la foto de la izquierda o el humanoide de la derecha.
|
|
|
El primer prototipo de estos módulos ya ha sido fabricado en la Universidad de Pekín. Es una primera versión “cutre” para comprobar que todo funciona bien. Esperamos que en unas cuantas semanas estén disponibles las versiones finales.
|
|
|