Hoy me he levantado con ganas de dibujar. Estoy trabajando en mi tesis y tengo muchas figuras pendientes de realizar. Me apetecÃa recrearme con el dibujo detallado de una ellas.
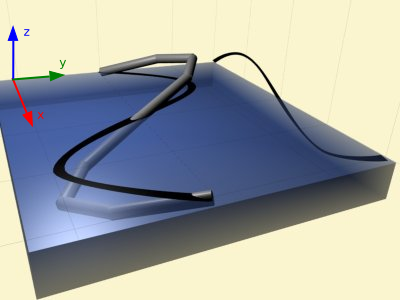
Se trata de una representación en 3D de una onda sinusoidal de las que uso para controlar a Hypercube. Los movimientos de este robot se realizan mediante la superposición de dos ondas, una verticual y otra horizontal. Según qué valores se den a los parámetros (amplitudes y fases) se obtienen ondas 3D diferentes. Y estas son las que determinan el movimiento del robot.
Para hacer el dibujo he utilizado las siguientes herramientas:
* Octave, para generar las gráficas de las ondas horizontales y verticales
* Qcad para pasar a DXF estas gráficas
* Blender para hacer la onda y el entorno en 3D
* Inkscape para añadir los ejes x,y,z
Todo hecho son software libre 
En el dibujo se muestran en negro las proyecciones de la onda 3D sobre el agua y el plano zx. Para poder ver intuitivamente qué partes de la onda están en la región z<0 y cuáles en z>0 he añadido un estanque de agua lo que además le da a este dibujo técnico un aspecto más artÃstico 
Las fuentes de Dibujo para Blender las he puesto aquÃ: sin3D.blend
Obijuan




 Â
 