Ya soy el Dr. Obijuan 😀
Estaba muy nervioso, pero todo salió bién. En la foto superior están todos los miembros del tribunal. De derecha a izquierda: Dr. Miguel Ãngel GarcÃa, Dr. Houxiang Zhang, Dr. Vicente Matellán, Dra. Cristina Urdiales y Dr. Jose MarÃa Cañas. En la parte de la izquierda está mi director: Dr. Eduardo Boemo.
Con los nervios de la lectura, no sé bien cuántas personas vinieron. Entre los asistentes estaban Angel de Castro, Jose Alberto Hernández, Sergio López-Buedo, Bas Huiszoon, Walter Fuertes, …

Los robóticos incondicionales Andrés Prieto-Moreno, Alejandro Alonso y Ricardo Gómez

Xavier de Blas vino expresamente desde Barcelona 😉 Me hizo mucha ilusión verle allÃ

También vino desde Málaga Chris (centro de la foto). Sólo nos conocÃamos virtualmente a través de Internet. Me hizo mucha ilusión que también estuviese allÃ. En la derecha está Juan José DomÃnguez, socio de A.R.D.E.

Y también estuvo mi mujer Mercedes, ayudándome con todos los preparativos. A nuestro hijo Juan lo dejamos con los abuelos 😉
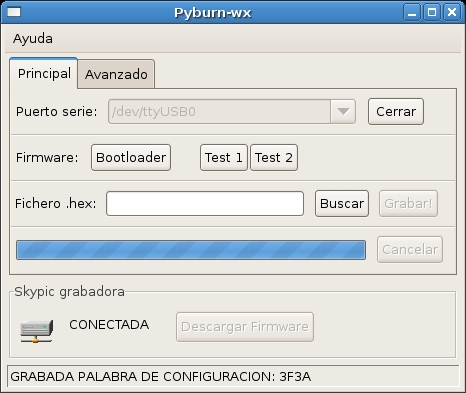
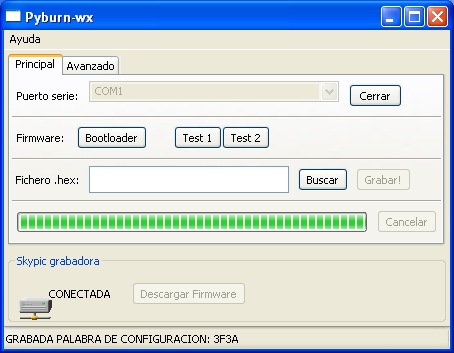
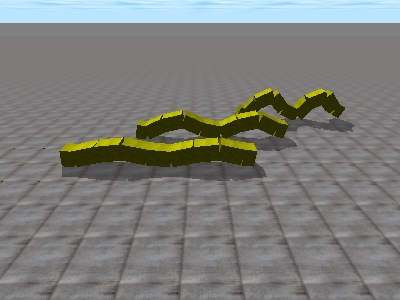
Toda la información de la tesis: presentación, memoria, vÃdeos, la estoy publicando en esta página del wiki.
Con esto pongo fin a una etapa que comencé en el 2001, cuando decidà dejar la empresa y convertirme en cientÃfico-investigador. Ahora comienzo una etapa nueva, con mucha ilusión, ganas y bastante incertidumbre sobre el futuro.
Obijuan


 Â