Ya puedo mover servos con JDE a través de la tarjeta Skypic. He programado dos drivers para hacer pruebas: servos8 y oscillator8. El primero permite que los esquemas muevan el servo a cualquier posición, especificando su ángulo como variable de entrada. El segundo genera oscilaciones en los servos que son controladas por los esquemas especificando su amplitud, fase y frequencia.
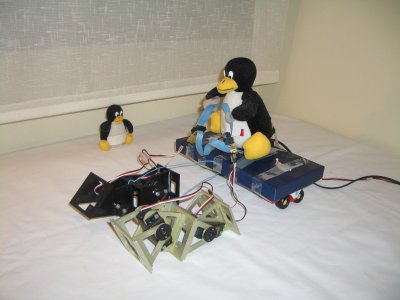
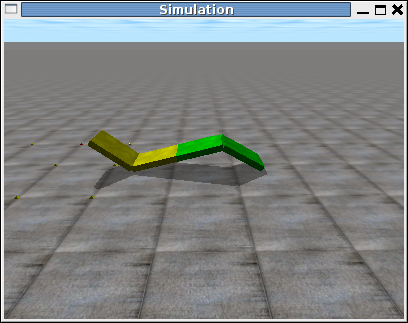
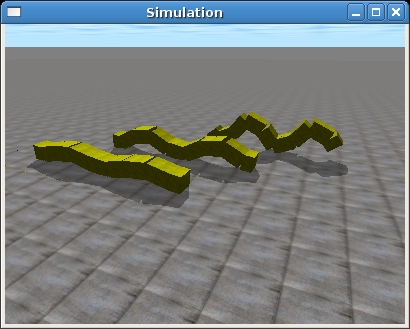
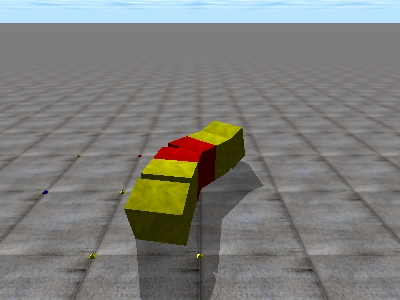
Es el driver oscillator8 el que permite realizar la locomoción de los robots ápodos modulares. En este vÃdeo se puede ver una demostración:
[youtube]http://youtube.com/watch?v=Xujl3OH5xt4[/youtube]
(Enlace directo al vÃdeo en Youtube)
Aquà están los enlaces de los diferentes elementos:
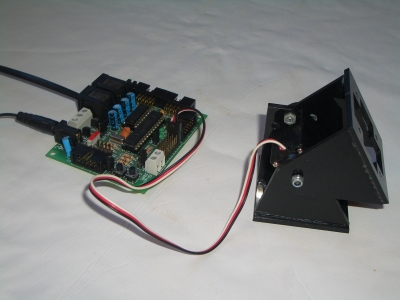
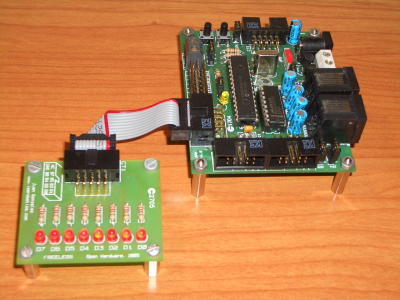
* Tarjeta skypic
* Módulo Y1
* Módulo GZ-I
* Configuración mÃnima (Minicube-I)
* Firmware cargado en la skypic
* Fuentes de los Drivers servos8 y oscillator8 (son versiones de prueba, con el código muy sucio)



 ¡Cómo pasa el tiempo!
¡Cómo pasa el tiempo!

{kind=link}
{kind=link}
{kind=link}
{kind=link}