Ahora que estoy en la fase final de la tesis, he vuelto a poner en marcha a Cube Revolutions para rehacer algunos experimentos. Este robot lo terminé en el 2004, pero he seguido realizando investigaciones con él. En el 2005 creé las configuraciones mÃnimas y en el 2006 construà a Hypercube, con el que he estado estudiando la locomoción sobre un plano.
He aprovechado para subir a mi canal de Youtube los vÃdeos que ya tenÃa de Cube Revolutions, y he creado algunos nuevos:
[youtube]http://www.youtube.com/watch?v=dl-LReQScZk[/youtube]
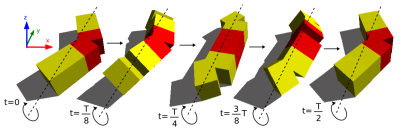
Aquà se ve el Robot moviéndose con diferentes valores de amplitud, frecuencia y diferencia de fase de los generadores sinusoidales encargados de la locomoción.
Y hasta me he atrevido a hacer un vÃdeo hablando con mi cutre-inglés y explicando algunas cosillas 
[youtube]http://www.youtube.com/watch?v=qsYA-FhS8Vs[/youtube]