El pasado viernes 8 de Agosto me invitó Pablo Varona, del grupo de Neurociencia Computacional de la Universidad Autónoma de Madrid a participar con ellos en una demostración de robots como parte del curso de verano “Non-linear Dynamics and Robots from Neurons to Cognition“. Asà que entre capÃtulo y capÃtulo de mi tesis, me escapé al Escorial.
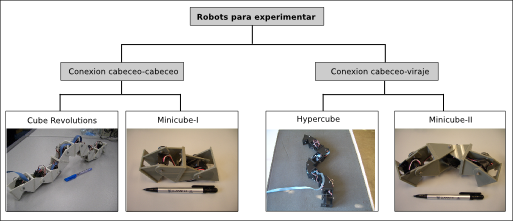
Hice una breve demostración de la locomoción de los robots ápodos modulares. Mostré a Hypercube y a MiniCube (Configuraciones mÃnimas). Pero claro, uno tiene alma friki, asà que no me pude contener e hice demostraciones del movimiento de un servo con el mando de la wii. Usando, además, el Tarri-wheel. Encontré la aplicación perfecta: colocar una bandera de España en el servo y moverlo con el wiimote para animar a los atletas que compiten en los juegos olÃmpicos de PekÃn 

En la demostración, además de Paolo Arena de la Universidad de Catania en Italia, que mostró un impresionante robot hexápodo controlado mediante modelos biológicos implementados directamente en hardware, estuvo Fernando Herrero Carrón mostrando en vivo el control de un robot ápodo de 8 módulos mediante modelos de CPGs interconectados de diferentes maneras. Actualmente está realizando la tesis doctoral en el grupo de Pablo Varona.
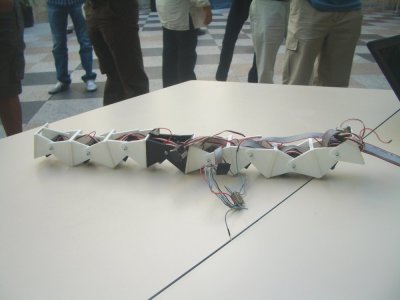
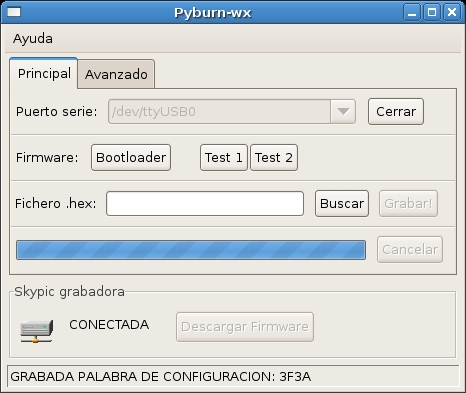
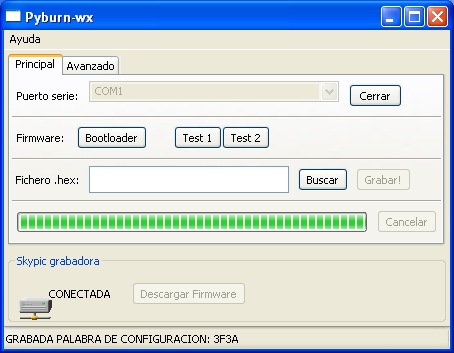
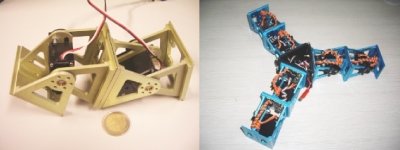
Este es el prototipo de robot que se han construido, inspirado en Cube Revolutions. Son este tipo de cosas las que me encantan de los sistemas libres: que cualquiera los puede reproducir, estudiar y mejorar. Lo ha fabricado Bèatrice Bert, una estudiantes francesa que está de intercambio y lo ha modificando para añadir electrónica que lea la posición de los servos y poder asà integrar esta información en los controladores basados en CPGs de Fernando. Un trabajo realmente interesante. La tarjeta de control que usan es la Skypic.
Como dirÃa Andrew, el robot humaniforme del cuento “El hombre bicentenario” de Isaac Asimov: “Uno se alegra de ser útil” 
Más información sobre la demostración
Obijuan