Los dÃas del 14 al 17 de Abril se celebró el congreso IEEE International Conference on Mechatronics (ICM09) organizado por la Universidad de Málaga. Yo asistà para presentar el artÃculo: A New Application of Modular Robots on Analysis of Caterpillar-like Locomotion realizado en colaboración con el grupo TAMS de la Universidad de Hamburgo.
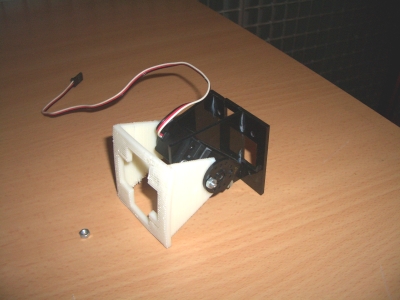
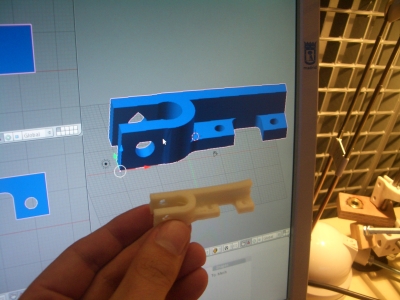
Me resulta extraño asistir a los congresos de robótica y no llevar robots, asà que a última hora decidà llevarme el prototipo de robot Cube-M y programarlo para que se moviese de manera autónoma usando los micro-osciladores. También hice un vÃdeo para mostarlo en la presentación, junto con la demostración en vivo, claro 
[youtube]http://www.youtube.com/watch?v=fLjjrJ7bun8[/youtube]
(Enlace al video en youtube)
Al terminar mi presentación, tuve que exponer también el artÃculo A Novel Passive Adhesion Principle and Application for an Inspired Climbing Caterpillar Robot. No soy autor de este trabajo, pero Houxiang me pidió que lo expuera por él, ya que asà sólo tendrÃa que asistir una sola persona al congreso.



 Se haga como se haga, el resultado siempre es injusto.
Se haga como se haga, el resultado siempre es injusto.

 Lo que más me gusta es que es muy sencillo realizar live-cds que se pueden grabar en un pen-drive para que arranque el ordenador, sin necesidad de tener que instalar nada. Esto es especialmente útil para dar talleres de robótica. A los asistentes se les entrega un pendrive con el que arrancar su ordenador y ya pueden trabajar.
Lo que más me gusta es que es muy sencillo realizar live-cds que se pueden grabar en un pen-drive para que arranque el ordenador, sin necesidad de tener que instalar nada. Esto es especialmente útil para dar talleres de robótica. A los asistentes se les entrega un pendrive con el que arrancar su ordenador y ya pueden trabajar.